Servo Motor Control Overview and detailed Function

Servo motors are used, for example, for production machines, industrial robots and tool machines. All these applications are characterized by the fact that the movements are executed highly dynamically. So that the workpiece or the product can be manufactured quickly. Servo motors are also used because of their high accuracy of control, because the accuracy of position and speed has a direct impact on the quality of the workpiece.
Advantages Servo Motors
Servo motors are AC motors, so they can be induction motors but also synchronous motors, BLDC motors are of course also included. Synchronous motors with permanent magnets are usually used. Because these can generate a higher torque in the lower speed range compared to induction motors, with the same size and lower phase current. Due to a higher torque, a robot, for example, can move a package from A to B faster. Quite often there is also talk of DC servo motors, but these are usually also only brushless DC servo motors, so basically BLDC motors. There are also RC servos for remote controlled cars, boats and planes, but these usually only contain a simple DC motor.
Video about Servo Motors
Servo Motor Drive System
A servo motor is always a part of an electric servo drive system, which consists of a servo motor, an inverter and a position sensor. The inverter is also often called power electronics, servo controller or simply controller. In order to control the position and speed very accurately, the position sensors have a high accuracy. In comparison, electric motors for fans or water pumps only have Hall sensors or are even operated without sensors. Often, the drive system also consists of a gearbox to increase the torque or to convert a rotatory movement into a translatory movement.

Design Servo Motor
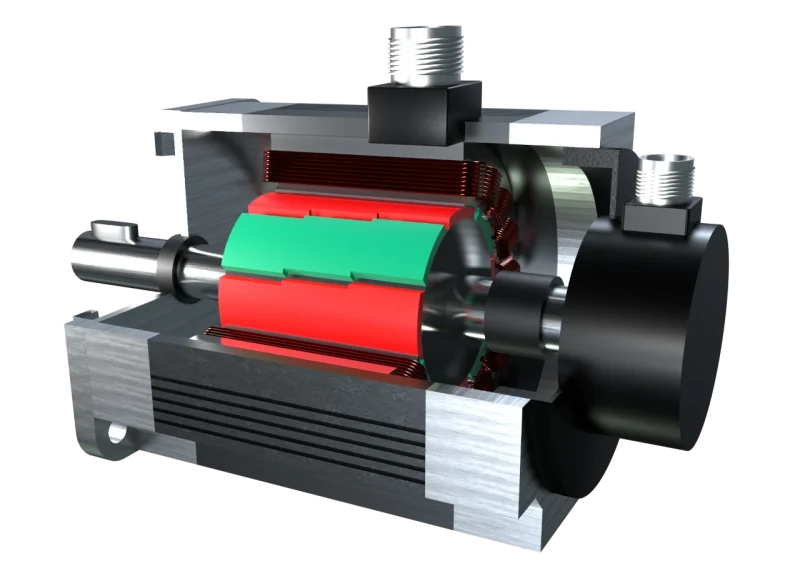
Servo Motor Control
