Contrôle du servomoteur et fonction détaillée

Avantages des servomoteurs
Les servomoteurs sont des moteurs à courant alternatif, ils peuvent donc être des moteurs asynchrones, mais aussi des moteurs synchrones, dont font bien sûr partie les moteurs BLDC. En règle générale, on utilise des moteurs synchrones avec des aimants permanents. En effet, par rapport aux moteurs asynchrones, ceux-ci peuvent générer un couple plus élevé dans la plage de vitesse inférieure, pour une taille identique et un courant de phase plus faible. Grâce à ce couple plus élevé, un robot peut par exemple déplacer un paquet plus rapidement de A vers B. On parle aussi souvent de servomoteurs C.C., mais ceux-ci ne sont généralement que des servomoteurs C.C. sans balais, c’est-à-dire en fait des moteurs BLDC. Il existe également des servos RC pour les voitures, les bateaux et les avions télécommandés, mais ceux-ci ne contiennent généralement qu’un simple moteur à courant continu.
Vidéo sur les servomoteurs
Système d’entraînement avec servomoteur
Structure et fonction des servomoteurs
Quelle est la différence entre un servomoteur et un moteur pour une pompe à eau ou un moteur électrique pour une voiture électrique ? Pour contrôler à la fois la vitesse et la position, une grande précision de couple est nécessaire, ce qui peut être obtenu au mieux avec des aimants extérieurs sur le rotor. Les moteurs électriques à aimants extérieurs sont également appelés SPMSM. Les aimants sont aussi souvent légèrement décalés les uns par rapport aux autres afin de rendre la courbe de couple plus lisse et d’améliorer ainsi la régulation douce de la vitesse. Pour une bonne régulation du couple, de nombreux pôles magnétiques sont utilisés dans le rotor, ce qui confère à la contre-CEM plus d’oscillations sinusoïdales par tour et réduit l’ondulation du couple. Plus de pôles magnétiques ont l’avantage supplémentaire d’augmenter la densité de couple du moteur, ce qui améliore son comportement dynamique. Comme les servomoteurs fonctionnent en alternance, ils ne disposent que très rarement d’un ventilateur ou d’un refroidissement par eau. Un refroidissement supplémentaire augmenterait certes la densité de puissance, mais pas la densité de couple, qui est plus importante pour les servomoteurs. Au lieu de cela, les servomoteurs n’ont que des ailettes de refroidissement. Le capteur de position, qui peut être optique, magnétique ou inductif, se trouve à l’arrière. Comme le capteur est placé à l’arrière du servomoteur, on a souvent l’impression que le servomoteur a deux connexions, mais la deuxième connexion n’est généralement que la prise pour le capteur. Il existe également des servomoteurs dans lesquels le variateur est monté directement sur le boîtier du moteur ou derrière le capteur. Toutefois, de tels servodrivers sont généralement utilisés pour des puissances plus faibles.

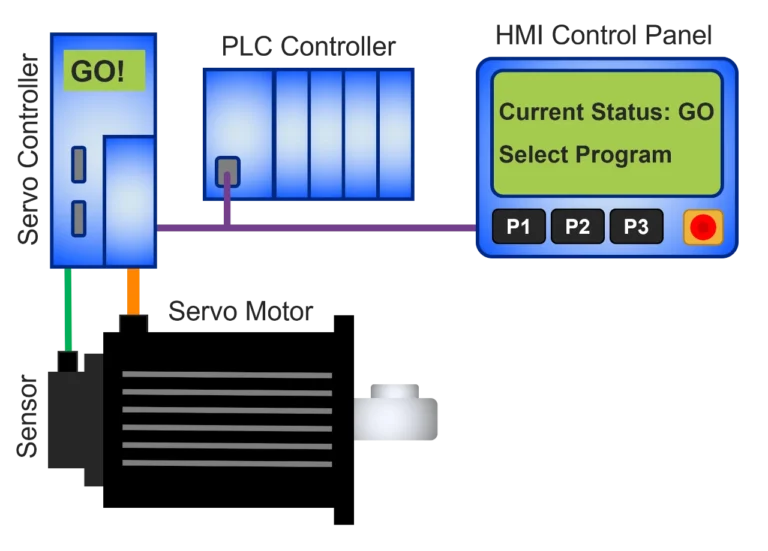
Commande de servomoteurs
Un servomoteur n’est donc pas si différent d’un moteur électrique pour une pompe à eau. En raison des nombreux pôles magnétiques, il faut non seulement un capteur avec une haute résolution, mais aussi un servo-régulateur avec un traitement très rapide des signaux du capteur et une bonne régulation. La commande d’un servomoteur s’effectue via un régulateur en cascade. Dans la cascade extérieure, la position est régulée, la position de consigne peut provenir d’une commande API via un système de bus ou d’une entrée analogique sur le variateur ou le servo-régulateur. Dans la cascade centrale, on régule la vitesse, qui doit être plus rapide que la position de régulation. La vitesse réelle du servomoteur est calculée à partir de la dérivée première du signal de position. Dans la cascade inférieure, le courant est régulé. En général, on utilise pour cela un FOC, qui permet de réguler les courants alternatifs avec un simple régulateur PID.
