Servomotoren

Vorteile von Servomotoren
Servomotoren sind Wechselstrommotoren, können also Asynchronmotoren sein, aber auch Synchronmotoren, zu denen natürlich auch BLDC-Motoren gehören. In der Regel werden Synchronmotoren mit Permanentmagneten verwendet. Denn diese können im Vergleich zu Asynchronmotoren ein höheres Drehmoment im unteren Drehzahlbereich erzeugen, bei gleicher Baugröße und geringerem Phasenstrom. Aufgrund des höheren Drehmoments kann ein Roboter zum Beispiel ein Paket schneller von A nach B bewegen. Oft ist auch von DC-Servomotoren die Rede, aber auch diese sind meist nur bürstenlose DC-Servomotoren, also im Grunde BLDC-Motoren. Es gibt auch RC-Servos für ferngesteuerte Autos, Boote und Flugzeuge, aber diese enthalten meist nur einen einfachen Gleichstrommotor.
Video über Servomotoren
Antriebssystem mit Servomotor

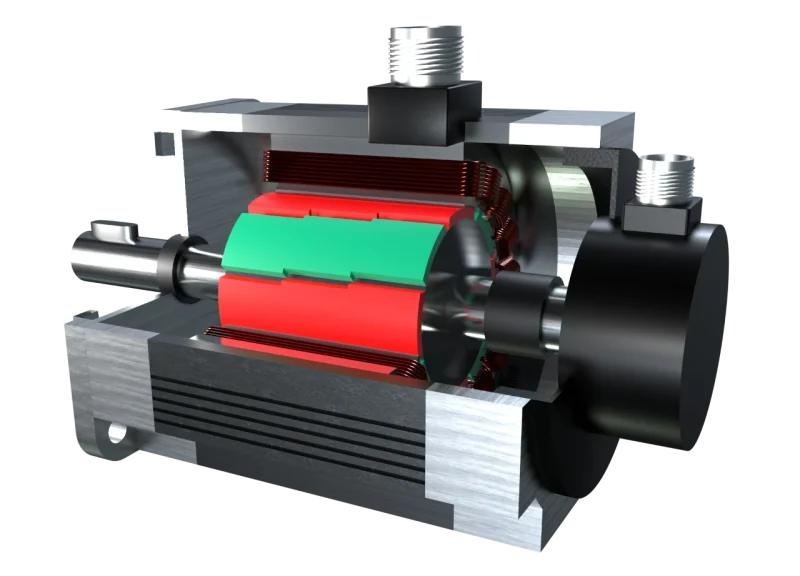
Aufbau und Funktion von Servomotoren
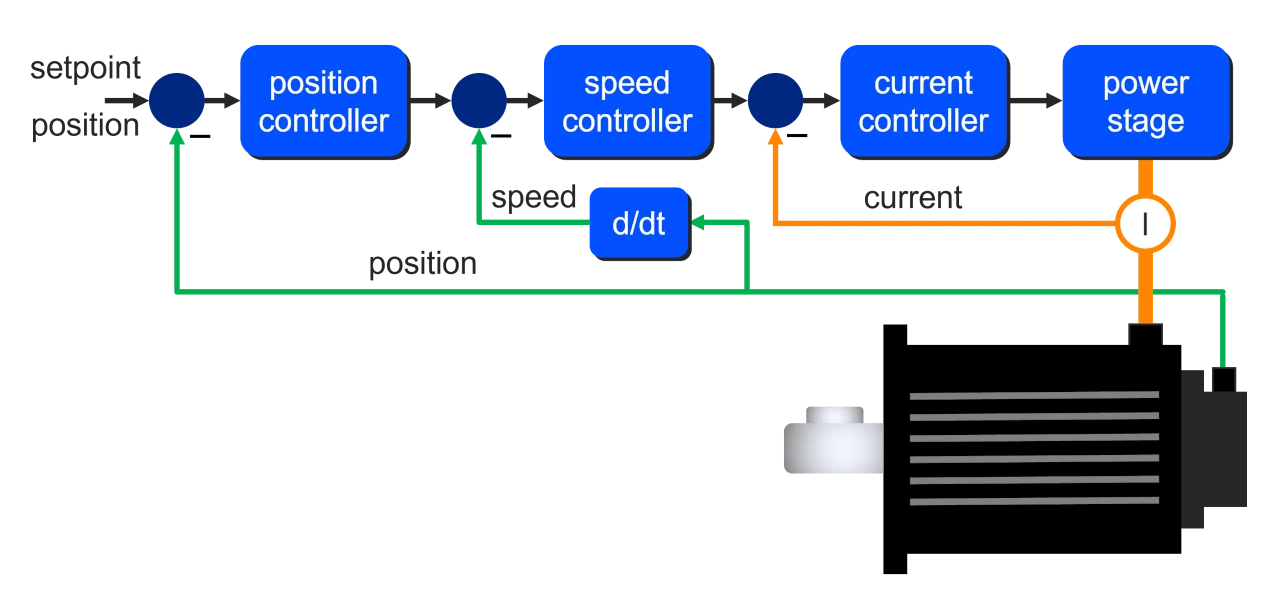
Regelung von Servomotoren
Ein Servomotor unterscheidet sich also nicht so sehr von einem Elektromotor für eine Wasserpumpe. Wegen der vielen Magnetpole wird nicht nur ein Sensor mit einer hohen Auflösung benötigt, sondern auch ein Servoregler mit einer sehr schnellen Verarbeitung der Sensorsignale und einer guten Regelung. Die Steuerung eines Servomotors erfolgt über einen Kaskadenregler. In der äußeren Kaskade wird die Position geregelt, die Sollposition kann von einer SPS-Steuerung über ein Bussystem oder über einen analogen Eingang am Umrichter bzw. Servoregler kommen. In der mittleren Kaskade wird die Drehzahl geregelt, die schneller sein muss als die Regelposition. Die Ist-Drehzahl des Servomotors wird aus der ersten Ableitung des Positionssignals berechnet. In der unteren Kaskade wird der Strom geregelt. In der Regel wird hierfür ein FOC verwendet, der es ermöglicht, die Wechselströme mit einem einfachen PID-Regler zu regeln.