Tipi di motori a riluttanza e funzioni
Motore sincrono a riluttanza e motore a riluttanza commutata
In un motore a riluttanza, il rotore del motore elettrico è costituito solo da lamiere elettriche. Il rotore non ha quindi né magneti permanenti né avvolgimenti o una gabbia di cortocircuito. Pertanto, il motore a riluttanza è molto economico da produrre. A causa della mancanza di eccitazione nel rotore, la densità di potenza è inferiore a quella dei motori sincroni a magneti permanenti. D’altra parte, i motori a riluttanza non hanno coppia di cogging e sono più sicuri in caso di cortocircuito. Poiché il rotore non ha né avvolgimenti né magneti permanenti, il motore a riluttanza può essere raffreddato bene ed è molto resistente alle alte temperature. Il traferro ha una grande influenza sull’efficienza dei motori a riluttanza e non dovrebbe essere superiore a 0,8 mm.
Tipi di motori a riluttanza
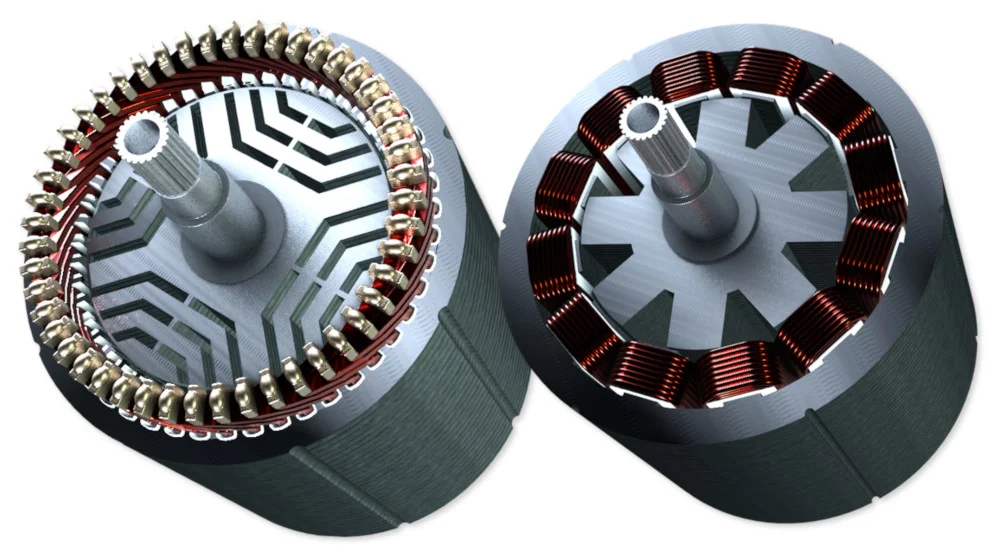
Esistono due tipi di motori a riluttanza: i motori a riluttanza commutati (SRM) e i motori a riluttanza sincroni (SynRM). I motori a riluttanza commutati hanno avvolgimenti concentrati, mentre i motori sincroni a riluttanza hanno avvolgimenti distribuiti. Rispetto al motore a riluttanza commutato, il motore a riluttanza sincrono ha un’ondulazione di coppia minore ed è quindi più silenzioso nel funzionamento. Inoltre, i motori a riluttanza sincrona hanno un’efficienza maggiore rispetto ai motori a riluttanza commutata. Questo perché il motore a riluttanza commutata richiede correnti di fase più elevate e la densità di flusso magnetico è inferiore rispetto ai motori a riluttanza sincroni.
Video sui Motori a Riluttanza
Motore Sincrono a Riluttanza

La struttura dello statore dei motori sincroni a riluttanza è quasi identica a quella di un motore asincrono. Il rotore è costituito da un nucleo laminato rotondo da cui vengono ricavate barriere di flusso magnetico. Il rotore non è adatto alle alte velocità, poiché per le alte velocità è necessario inserire barre aggiuntive nelle barriere di flusso per garantire la stabilità della velocità. Tuttavia, questi nastri hanno un effetto negativo sull’efficienza della macchina. Il motore a riluttanza sincrono ha un’ondulazione di coppia molto più ridotta rispetto a un motore a riluttanza commutato. Anche l’efficienza è molto più elevata rispetto ai motori SR. Poiché il motore a riluttanza sincrona ha una corrente di fase inferiore, l’inverter o l’elettronica di potenza sono meno costosi. Tuttavia, per realizzare un buon controllo e una buona regolazione è necessario utilizzare un sensore di posizione con una risoluzione sufficiente.
Motore a Riluttanza Commutata
Il motore a riluttanza commutata (SRM) è chiamato anche motore SR. Lo statore e il rotore del motore a riluttanza commutata sono costituiti da poli distinti. Lo statore ha un avvolgimento concentrato, il che significa che ogni dente porta un avvolgimento. Il numero di poli dello statore e del rotore deve essere diverso. Di norma, il numero di poli dello statore è maggiore di quello del rotore. Una combinazione tipica è 6/4, cioè 6 poli dello statore e 4 del rotore. Poiché il rotore è costituito da un solo nucleo laminato, il motore SR è particolarmente adatto a velocità molto elevate. La produzione del motore a riluttanza commutata è relativamente semplice, poiché gli avvolgimenti possono essere pre-avvolti e devono solo essere spinti sui denti dello statore. Il motore SR ha un’ondulazione di coppia più elevata, che lo rende più rumoroso rispetto, ad esempio, a un motore sincrono a riluttanza. L’ondulazione della coppia deriva dalle correnti di fase più elevate che il motore richiede. L’inverter o l’elettronica di potenza per i motori a riluttanza commutata è più costosa rispetto a quella di un motore a riluttanza sincrono, ad esempio, a causa delle elevate correnti di fase. La risoluzione del sensore di posizione, d’altra parte, può essere bassa, il che significa che è possibile utilizzare un sensore più economico.

Motore a Riluttanza Funzione
Il funzionamento dei motori a riluttanza è relativamente semplice. Affinché il rotore possa ruotare, la resistenza magnetica deve variare in funzione della posizione. La resistenza magnetica è chiamata anche riluttanza, da cui deriva il nome di motore a riluttanza. Quando viene applicata una tensione a un avvolgimento dello statore, scorre una corrente. La corrente genera un flusso magnetico che attraversa lo statore e il rotore. Il rotore gira nella direzione in cui la resistenza magnetica per il flusso magnetico diventa minore. Si crea così una coppia, che torna a zero non appena il rotore raggiunge la posizione di minor resistenza magnetica. Per ottenere una rotazione continua, è necessario applicare una tensione all’avvolgimento successivo.