Reluktanzmotoren Typen und Funktion
Synchronreluktanzmotor und geschalteter Reluktanzmotor
Bei einem Reluktanzmotor besteht der Rotor des Elektromotors nur aus Elektroblech. Der Rotor verfügt also weder über Permanentmagnete noch über Wicklungen oder einen Kurzschlusskäfig. Deshalb ist der Reluktanzmotor sehr kostengünstig in der Herstellung. Aufgrund der fehlenden Erregung im Rotor ist die Leistungsdichte geringer als bei Permanentmagnet Synchronmotoren. Dafür besitzen Reluktanzmotoren kein Rastmoment und verfügen über eine höhere Sicherheit im Falle eines Kurzschlusses. Da der Rotor weder über Wicklungen noch Permanentmagnete verfügt, kann der Reluktanzmotor gut gekühlt werden und ist sehr robust gegenüber hohen Temperaturen. Der Luftspalt hat bei Reluktanzmotoren einen großen Einfluss auf den Wirkungsgrad und sollte nicht größer sein als 0,8 mm.
Reluktanzmotor Typen
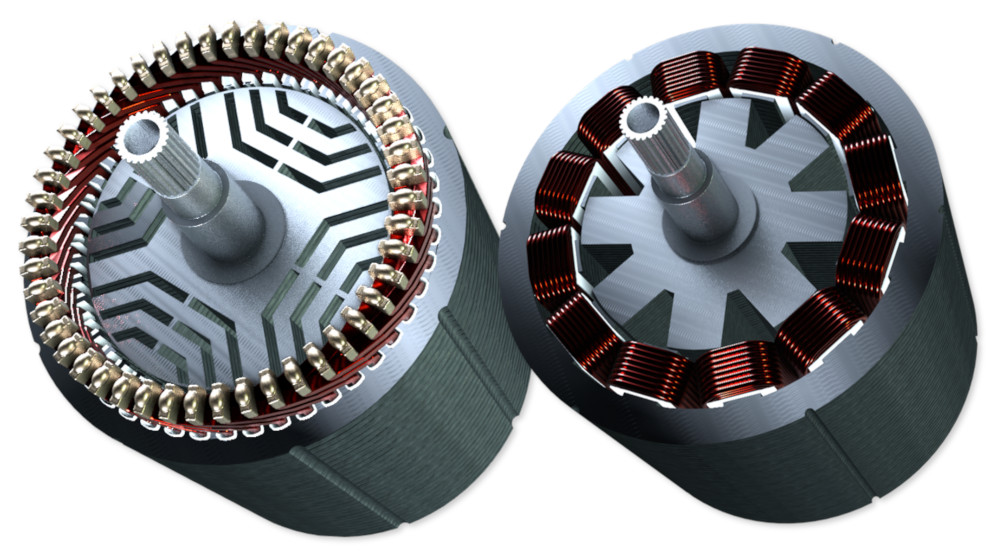
Es gibt zwei Typen von Reluktanzmotoren, geschaltete Reluktanzmotoren (SRM) und Synchron-Reluktanzmotoren (SynRM). Geschaltete Reluktanzmotoren haben konzentrierte Wicklungen, während Synchron-Reluktanzmotoren verteilte Wicklungen besitzen. Im Vergleich zum geschalteten Reluktanzmotor besitzt der Synchron-Reluktanzmotor einen kleineren Drehmomentenrippel und ist somit auch leiser im Betrieb. Des Weiteren haben Synchron-Reluktanzmotoren einen höheren Wirkungsgrad als geschaltete Reluktanzmotoren. Das liegt daran, dass der geschaltete Reluktanzmotor höhere Phasenströme benötigt und die magnetische Flussdichte bei Synchron-Reluktanzmotor kleiner ist.
Video über Reluktanzmotoren
Synchron-Reluktanzmotor
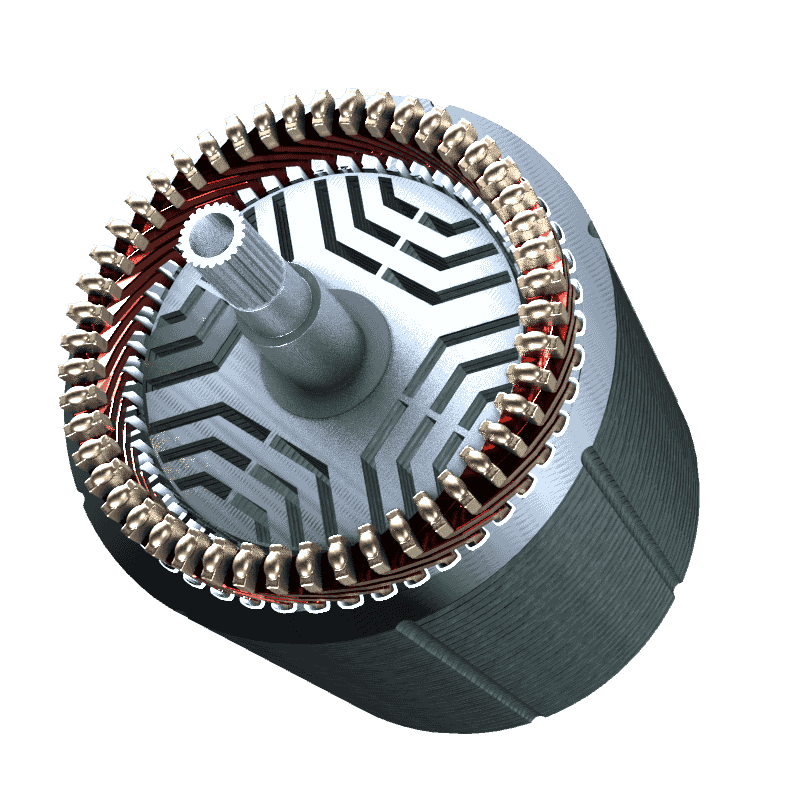
Der Aufbau des Stators von Synchron-Reluktanzmotoren ist nahezu identisch, wie der eines Asynchronmotors. Der Rotor besteht einem runden Blechpakt, aus welchen magnetische Flussbarrieren ausgestanzt sind. Der Rotor ist nicht für hohe Drehzahlen geeignet, da für hohe Drehzahlen zusätzliche Stege in die Flussbarrieren eingefügt werden müssen, um die Drehzahlfestigkeit zu garantieren. Diese Stege wirken sich allerdings negativ auf den Wirkungsgrad der Maschine aus. Der Synchron-Reluktanz Motor verfügt über einen sehr viel kleineren Drehmomentenrippel, als ein geschalteter Reluktanzmotor. Auch der Wirkungsgrad ist wesentlich höher als bei SR-Motoren. Da der Synchron-Reluktanzmotor einen niedrigeren Phasenstrom besitzt, ist sein Inverter bzw. die Leistungselektronik kostengünstiger. Allerdings muss ein Positionssensor mit einer ausreichenden Auflösung eingesetzt werden, um die eine gute Ansteuerung und Regelung umzusetzen.
Geschalteter Reluktanzmotor
Der geschaltete Reluktanzmotor (SRM) wird auch als SR-Motor bezeichnet. Der Stator und der Rotor des geschalteten Reluktanzmotors besteht aus ausgeprägten Polen. Der Stator verfügt über eine konzentrierte Wicklung, dass bedeutet das jeder Zahn eine Wicklung trägt. Die Anzahl Stator Pole und Rotor Pole muss sich unterscheiden. In der Regel ist die Anzahl der Pole im Stator größer als vom Rotor. Eine typische Kombination ist 6/4, also 6 Stator Pole und 4 Rotor Pole. Da der Rotor nur aus einem Blechpakt besteht, eignet dich der SR-Motor besonders gut für sehr hohe Drehzahlen. Die Fertigung des geschalteten Reluktanzmotors ist relativ einfach, da Wicklungen vorgewickelt werden können und nur noch auf die Zähne des Stators aufgeschoben werden müssen. Der SR-Motor verfügt über einen höheren Drehmomentenrippel, wodurch der Motor lauter ist als beispielweise ein Synchron-Reluktanzmotor. Der Drehmomentenrippel kommt von den höheren Phasenströmen, die der Motor benötigt. Der Inverter bzw. die Leistungselektronik für geschalte Reluktanzmotoren ist aufgrund der hohen Phasenströme teurer als beispielsweise für einen Synchron-Reluktanzmotor. Die Auflösung des Positionssensors kann hingegen niedrig ausfallen, wodurch ein günstiger Sensor eingesetzt werden kann.

Reluktanzmotor Funktion
Die Funktion von Reluktanzmotoren ist relativ simple. Damit sich der Rotor dreht, muss sich der magnetische Widerstand mit der Position ändern. Dabei bezeichnet man den magnetischen Widerstand auch als Reluktanz, daher kommt auch der Name Reluktanzmotor. Durch das Anlegen einer Spannung an eine Wicklung im Stator fließt ein Strom. Der Strom erzeugt einen magnetischen Fluss, der durch den Stator und den Rotor fließt. Der Rotor dreht sich in die Richtung, in welche der magnetische Widerstand für den magnetischen Fluss kleiner wird. Dadurch entsteht ein Drehmoment, welches wieder zu null wird, sobald der Rotor die Position des kleinsten magnetischen Widerstandes erreicht hat. Um eine kontinuierliche Drehbewegung zu erhalten, muss dann eine Spannung an die nächste Wicklung angelegt werden.