Moteurs à réluctance Types et fonction
Moteur à réluctance synchrone et moteur à réluctance commutée

Dans un moteur à réluctance, le rotor du moteur électrique est uniquement constitué de tôle électrique. Le rotor ne dispose donc ni d’aimants permanents, ni d’enroulements, ni d’une cage de court-circuit. C’est pourquoi le moteur à réluctance est très peu coûteux à fabriquer. En raison de l’absence d’excitation dans le rotor, la densité de puissance est inférieure à celle des moteurs synchrones à aimants permanents. En revanche, les moteurs à réluctance ne possèdent pas de couple d’arrêt et disposent d’une plus grande sécurité en cas de court-circuit. Comme le rotor ne dispose ni d’enroulements ni d’aimants permanents, le moteur à réluctance peut être bien refroidi et est très résistant aux températures élevées. L’entrefer a une grande influence sur le rendement des moteurs à réluctance et ne devrait pas dépasser 0,8 mm.
Types de moteurs à réluctance
Il existe deux types de moteurs à réluctance : les moteurs à réluctance commutée (SRM) et les moteurs à réluctance synchrone (SynRM). Les moteurs à réluctance commutée ont des enroulements concentrés, tandis que les moteurs à réluctance synchrone ont des enroulements répartis. Par rapport au moteur à réluctance commutée, le moteur à réluctance synchrone possède un couple de rotation plus petit et est donc plus silencieux. En outre, les moteurs à réluctance synchrone ont un rendement plus élevé que les moteurs à réluctance commutée. Cela s’explique par le fait que le moteur à réluctance commutée nécessite des courants de phase plus élevés et que la densité de flux magnétique du moteur à réluctance synchrone est plus faible.
Vidéo sur les moteurs à réluctance
Moteur à réluctance synchrone
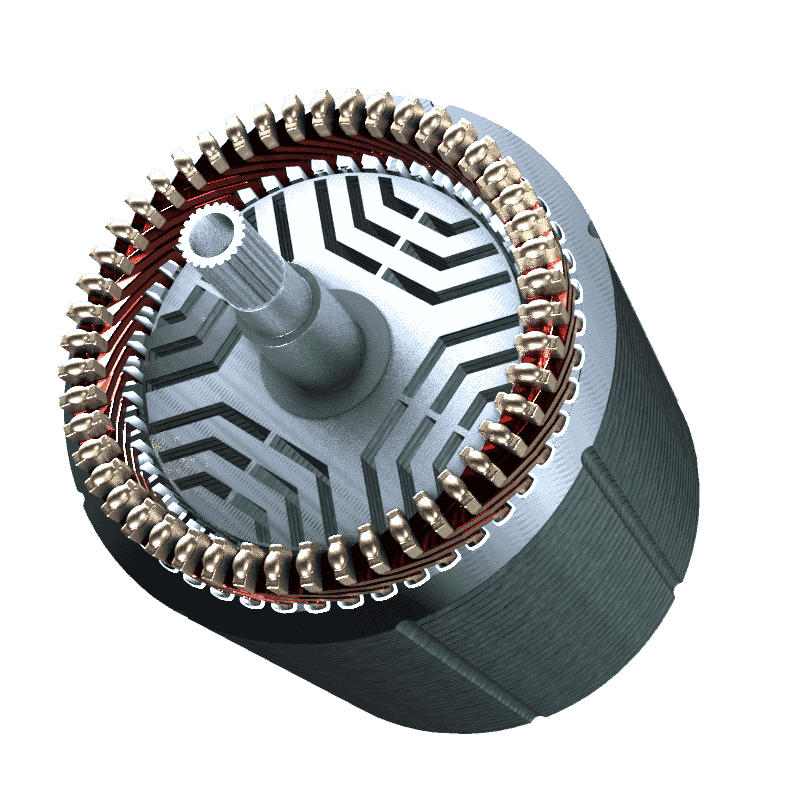
La structure du stator des moteurs à réluctance synchrone est presque identique à celle des moteurs asynchrones. Le rotor est constitué d’un paquet de tôles rondes dans lesquelles sont découpées des barrières de flux magnétique. Le rotor n’est pas adapté aux vitesses de rotation élevées, car pour les vitesses élevées, des entretoises supplémentaires doivent être insérées dans les barrières de flux afin de garantir la résistance à la vitesse. Ces entretoises ont toutefois un effet négatif sur le rendement de la machine. Le moteur à réluctance synchrone dispose d’un couple beaucoup plus faible qu’un moteur à réluctance commuté. Le rendement est également beaucoup plus élevé que celui des moteurs SR. Comme le moteur à réluctance synchrone a un courant de phase plus faible, son inverseur ou son électronique de puissance est moins cher. Il faut toutefois utiliser un capteur de position avec une résolution suffisante pour réaliser une bonne commande et une bonne régulation.
Moteur à réluctance commutée
Le moteur à réluctance commutée (SRM) est également appelé moteur SR. Le stator et le rotor du moteur à réluctance commutée sont constitués de pôles distincts. Le stator dispose d’un enroulement concentré, ce qui signifie que chaque dent porte un enroulement. Le nombre de pôles du stator et du rotor doit être différent. En règle générale, le nombre de pôles du stator est supérieur à celui du rotor. Une combinaison typique est 6/4, c’est-à-dire 6 pôles de stator et 4 pôles de rotor. Comme le rotor n’est composé que d’une seule paire de tôles, le moteur SR convient particulièrement bien aux vitesses très élevées. La fabrication du moteur à réluctance commutée est relativement simple, car les enroulements peuvent être pré-enroulés et il suffit de les glisser sur les dents du stator. Le moteur SR dispose d’un couple plus élevé, ce qui rend le moteur plus bruyant qu’un moteur à réluctance synchrone, par exemple. L’ondulation du couple est due aux courants de phase plus élevés dont le moteur a besoin. L’onduleur ou l’électronique de puissance pour les moteurs à réluctance commutée est plus cher que pour un moteur à réluctance synchrone, par exemple, en raison des courants de phase élevés. En revanche, la résolution du capteur de position peut être faible, ce qui permet d’utiliser un capteur bon marché.
