Structure et fonction du moteur asynchrone
Rotors en court-circuit et rotors à bagues
Le moteur asynchrone est également appelé moteur à induction, car les moteurs asynchrones fonctionnent selon le principe de l’induction. Le moteur asynchrone est désigné par les abréviations ASM ou IM. En fonctionnement moteur, le rotor d’un moteur asynchrone tourne plus lentement que le champ magnétique rotatif du stator, donc de manière asynchrone par rapport au stator. La différence entre la vitesse de rotation du stator et la vitesse de rotation du rotor est également appelée “glissement”. Si la vitesse du rotor est égale à la vitesse du stator, le glissement est nul et le moteur asynchrone ne fournit pas de couple positif. En mode générateur, le rotor tourne plus vite que le champ de rotation du stator. La différence de vitesse génère un couple négatif qui tente de freiner le rotor. Les moteurs asynchrones qui fonctionnent directement sur du courant alternatif biphasé ou triphasé sans inverseur ont un rendement inférieur à celui des moteurs synchrones à aimants permanents. Toutefois, les moteurs asynchrones qui fonctionnent avec un inverseur peuvent atteindre des rendements élevés similaires.
Structure du moteur asynchrone
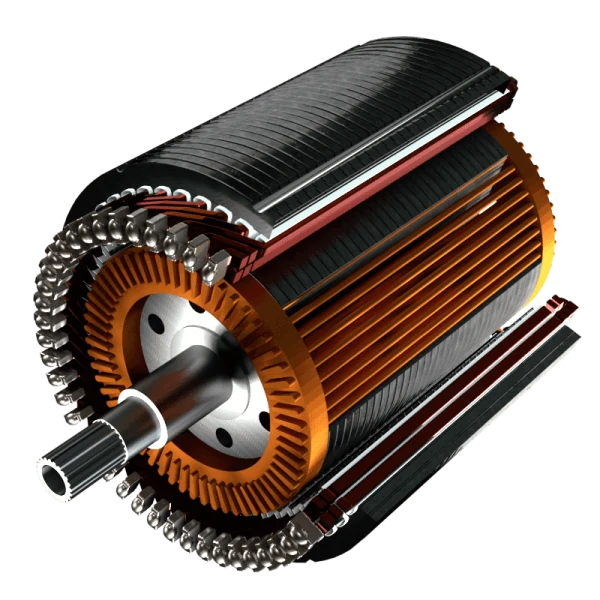
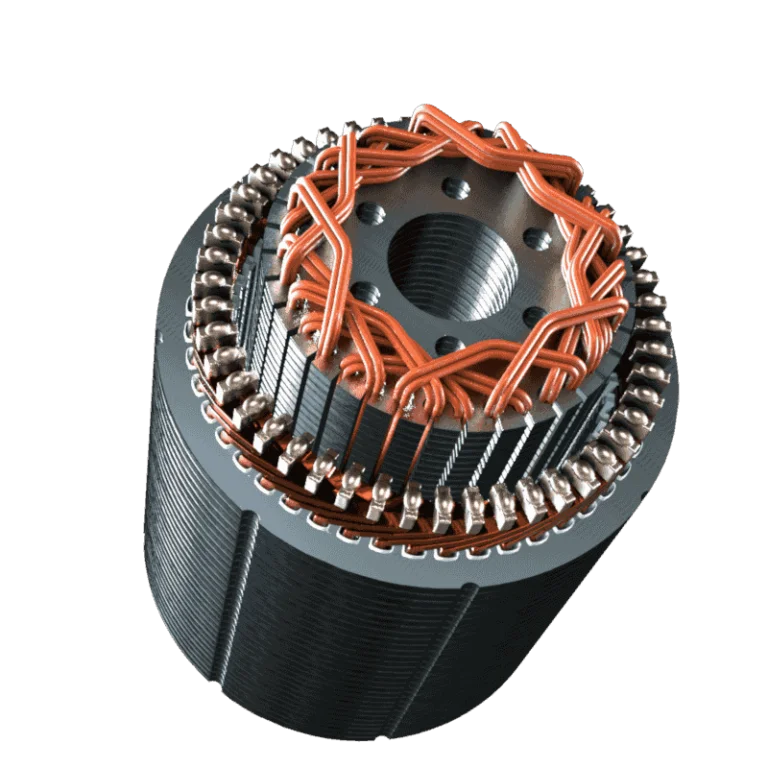
Il existe deux types de moteurs asynchrones différents : les moteurs à cage d’écureuil et les moteurs à bagues. La structure du stator est la même pour les deux et ressemble à celle d’un moteur synchrone. Pour conduire le flux magnétique dans le moteur électrique, le stator et le rotor sont constitués de plusieurs couches de tôle électrique, dont l’épaisseur est généralement de 0,5 mm. Plus la tôle électrique est fine, plus les pertes par courants de Foucault dans le moteur électrique sont faibles et plus son rendement est élevé. Le stator porte les enroulements dans lesquels circule le courant triphasé. En règle générale, le stator comporte trois phases de moteur qui peuvent être connectées en étoile ou en triangle. Mais il existe également des moteurs avec plusieurs phases, voire moins, ce qui dépend principalement de l’utilisation prévue et de la tension d’alimentation. Le rotor contient des barres conductrices court-circuitées ou des enroulements, selon le type de moteur asynchrone.
Moteur asynchrone à rotor à cage d’écureuil

Le rotor d’un rotor à cage d’écureuil est constitué d’une cage de barres en aluminium ou en cuivre. Les barres sont court-circuitées aux extrémités supérieures et inférieures par des anneaux du même matériau. Le rotor à cage d’écureuil est le plus souvent utilisé car il ne possède pas de bagues collectrices et a donc une durée de vie plus longue. De plus, la fabrication du rotor est beaucoup moins coûteuse.
Moteur asynchrone avec rotor à bagues
Dans le cas d’un rotor à bagues, le rotor est constitué d’enroulements et non de barres. Les enroulements ne sont pas court-circuités dans le rotor, mais conduits vers l’extérieur par des bagues collectrices et court-circuités par des résistances supplémentaires. Les résistances extérieures au moteur électrique permettent d’influencer le flux de courant dans le rotor.
Moteur asynchrone fonctionnement
Un champ magnétique tournant est généré par un courant triphasé dans les enroulements du stator. Le champ magnétique rotatif du stator traverse également le rotor via l’entrefer. Lorsqu’il y a une différence de vitesse entre la vitesse du rotor et la vitesse du stator, le champ magnétique rotatif induit une tension dans les barres conductrices du rotor. Comme les barres conductrices sont court-circuitées entre elles aux extrémités inférieure et supérieure, la tension induite génère un flux de courant dans les barres. Le courant de court-circuit dans les barreaux génère à son tour un champ magnétique dans le rotor, qui suit le champ magnétique du stator. Contrairement aux moteurs synchrones à aimants permanents, le champ magnétique du rotor n’est pas lié à l’emplacement, mais tourne sur le rotor. Lorsque le rotor tourne à la même vitesse que le stator, il n’y a plus de courant induit dans les barres conductrices et donc plus de couple généré. En cas de court-circuit du stator, plus aucune tension n’est induite par le rotor. Cela fait du moteur asynchrone un moteur électrique très sûr, raison pour laquelle de grands constructeurs automobiles comme Tesla et Audi, entre autres, utilisent le moteur asynchrone dans leurs véhicules électriques.
Avantages et inconvénients
Jetez un coup d’œil sur les avantages et les inconvénients des moteurs asynchrones à bagues et à cage d’écureuil avec et sans inverseur.

ASM Rotor à bagues
Le principal avantage d’un moteur asynchrone avec bagues collectrices est le couple plus élevé dans la plage de vitesses inférieure et le courant de démarrage plus faible. Cependant, le coût supplémentaire des bagues collectrices et également de la fabrication du rotor avec les enroulements est considérable. C’est pourquoi le rotor à bagues n’est utilisé aujourd’hui que pour les très gros moteurs électriques, pour lesquels un convertisseur serait trop coûteux.
Cage de court-circuit ASM sans inverseur
Le principal avantage d’un moteur à cage d’écureuil est le faible coût de fabrication du rotor par rapport à un moteur synchrone à aimants permanents, ou PMSM. Le moteur asynchrone est très résistant aux températures élevées. Il n’est pas nécessaire de se préoccuper de la démagnétisation des aimants, comme c’est le cas pour un PMSM. Son principal inconvénient est son faible couple de démarrage et son faible rendement si vous n’utilisez pas de convertisseur.
Cage de court-circuit ASM avec inverseur
Avec un convertisseur, le moteur asynchrone peut atteindre un rendement aussi élevé qu’un PMSM à grande vitesse. La puissance et le couple de pointe sont également très bons, car il n’est pas nécessaire de se préoccuper de la démagnétisation des aimants. La puissance continue peut poser problème si la chaleur générée dans le rotor ne peut pas être évacuée correctement.